 RU
RU  EN
EN  CN
CN  ES
ES 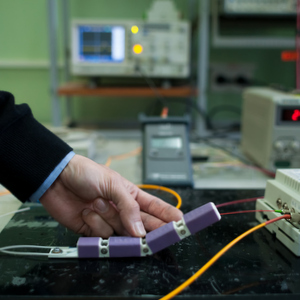
The design of robotized complexes intended for working in extreme conditions is a major trend in the global engineering industry. That said, it is critically important to create a high-precision sensor-based system whose object-recognition ability meets or exceeds human powers. These system sensors must be able to detect magnitudes of pressure, vibration, temperature, rotation speed, impact, mass, magnetic field density, current, etc., in conditions of fluctuating temperature and wide-ranging, high-intensity nuclear radiation.
Despite the fact that such research has been conducted for a long time in the USA, Germany, Japan and Korea, their designs have a limited range of use (terrestrial), insofar as they are based on semiconductor sensors.
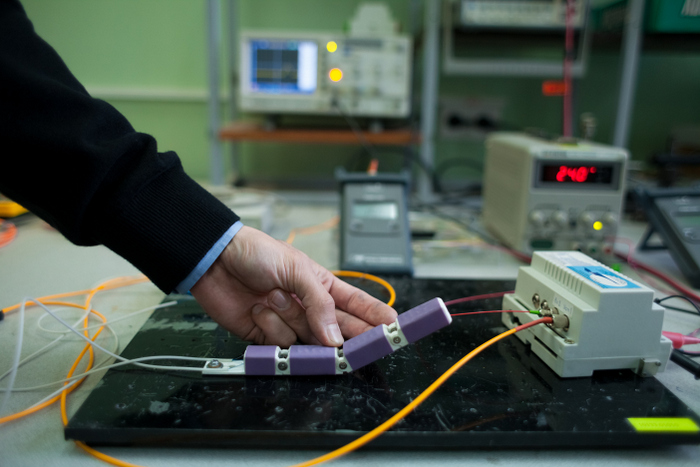
Samara University scientists have chosen the path of the development and application of control-and-monitoring devices for standalone robotized platforms on the basis of fibre-optical sensors (FOS). Unlike semiconductor sensors, they are virtually unaffected by radiation, and thus may be used in the creation of space robots. Currently, a prototype manipulating mechanical hand for the spacecraft robot has already been built at the NIL-53 R&D laboratory of the Institute of Engines and Power Units at Samara University, and now the scientists are working on the creation of “artificial skin” with sensors distributed all over its surface.
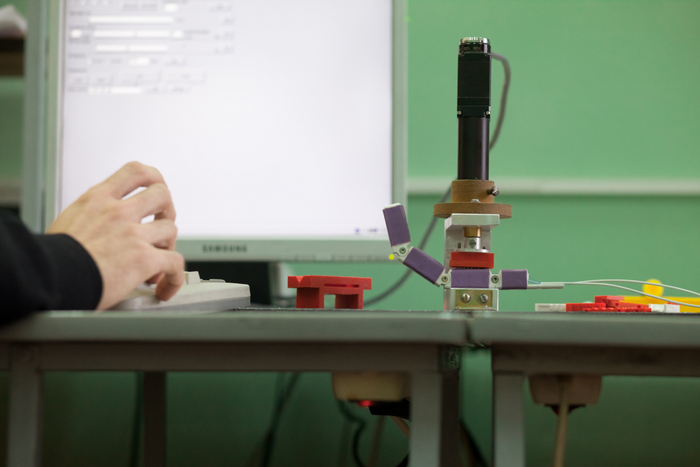
On the outside, the manipulator looks a lot like human hand – it also has fingers and knuckles, just manufactured out of artificial materials. Due to the usage of artificial skin wired with lots of FOS, these manipulating hands will enable a robot to estimate the form of an object, its temperature, required grip force, and many other parameters. That said, a human inside the spacecraft will operate the manipulating robot hands. Robot fingers will be able to repeat all of the operator’s movements. Pressure sensors incorporated into the manipulating grips, along with a special auxiliary system, will be able to transfer all of the necessary information to the operator. The operator, wearing special gloves, will be able to feel what the space robot touches outside the space station.
Development of an FOS-based informationally-integrated system for monitoring the force and positioning of robotic manipulators by Samara University scientists is being financed from the federal budget on behalf of the “Android Machinery” Research and Manufacturing Association, which is currently working on creation of the first Russian torso-type anthropomorphic robot, in conjunction with the Central Research Institute of Machine-Building.
“Torso-type” means that only the upper part of the robot will look somewhat human-like (it has a body, a head and two manipulating grips), while the lower part is basically a platform.
“The semi-android space robot can be attached to different parts of a spacecraft shell, including platforms that slide out into open space for the performance of outside work and studies,” says Professor Sergey Matyunin, research advisor of the R&D Laboratory for the Power-Installation Automated Systems Department at Samara University.
Over the long term, a robot with “sensitive” hands will be able to perform equipment and assemblies maintenance outside space stations on its own: it will be able to perform visual inspection, technological work and repair operations, as well as the maintenance of scientific devices.
According to experts, the use of robots in outer space will significantly decrease both risks to human health and safety, as well as space expedition costs. Moreover, robots with “artificial skin” will be suitable for a wide range of terrestrial applications, such as working underwater or clearing rubble, i.e. in situations deemed unsafe for humans.