В Самарском национальном исследовательском университете имени академика С.П. Королёва приступили к разработке элементов информационно-интегрированной системы для контроля усилия и положения захватов робота на основе волоконно-оптических датчиков. Эти элементы предназначены для систем автоматического управления автономными роботизированными платформами наземного, воздушного и космического базирования. Первый робот, чьи "руки" будут покрыты "искусственной кожей", созданной учеными Самарского университета, полетит к Международной космической станции в 2020 году.

Разработка роботизированных комплексов для работы в экстремальных условиях является одним из основных трендов в мировом машиностроении. При этом принципиально важным является создание чувствительной системы на основе сенсоров, близкой или превосходящей по распознаванию предметов к человеческой. Датчики такой системы в условиях перепада температур в широком диапазоне и высокой интенсивности ионизирующего излучения должны распознавать величину давления, вибрации, температуры, скорости вращения, усилия, массы напряжения магнитного поля, величины тока и т.д.
Несмотря на то что разработками подобных систем активно занимаются в США, Германии, Японии и Кореи, созданные там конструкции имеют ограниченное применение (наземное), поскольку основаны на применении полупроводниковых датчиков.
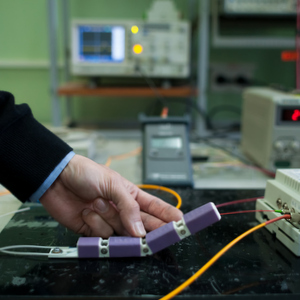
Ученые Самарского университета пошли по пути разработки и применения элементов контроля и управления роботизированными автономными платформами на основе волоконно-оптических датчиков (ВОД). В отличие от полупроводниковых датчиков, они, практически, не подвержены влиянию радиации, а значит, могут быть применены для создания "космических" роботов. В настоящий момент в научно-исследовательской лаборатории НИЛ-53 института двигателей и энергетических установок Самарского университета уже создан образец руки-манипулятора робота-космонавта, и сейчас ученые работают над созданием "искусственной кожи" с распределенными по поверхности сенсорами.
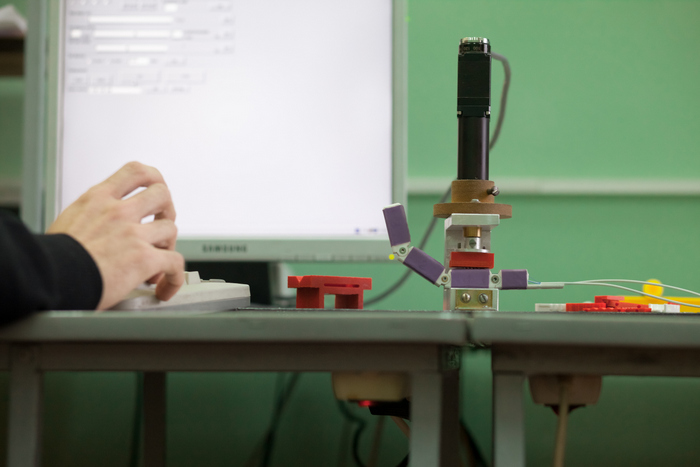
Внешне рука-манипулятор выглядит, как рука человека – также имеет пальцы, суставы, выполненные из искусственных материалов. Благодаря искусственной коже, начиненной ВОД-сенсорами, этими руками робот сможет самостоятельно определять форму предмета, температуру, усилия захвата и многое другое. При этом управлять движениями рук робота в космосе будет человек, находящийся в космическом корабле. Пальцы робота будут повторять все движения оператора. Сенсоры давления встроены в захваты-манипуляторы, и специальная система будет передавать всю необходимую информацию оператору. Таким образом, оператор в специальных перчатках будет чувствовать тоже самое, что и робот-космонавт за бортом станции.
Разработка учеными Самарского университета элементов информационно-интегрированной системы для контроля усилия и положения захватов робота на основе ВОД финансируется из федерального бюджета в интересах НПО "Андроидная техника", которое совместно с ЦНИИ Машиностроения создает первого российского торсового антропоморфного робота.
"Торсовый" означает, что на человека похожа лишь верхняя часть робота (корпус, голова и два захвата-манипулятора), а нижняя часть представляет собой платформу.
"Робота-космонавта полуандроидного типа можно прикреплять к различным частям корпуса космических аппаратов, в том числе к выдвигающимся в космос платформам для проведения наружных работ", - рассказал научный руководитель научно-исследовательской лаборатории кафедры автоматизированных систем энергетических установок Самарского университета, профессор Сергей Матюнин.
В перспективе, робот с "чуткими" руками сможет самостоятельно выполнять обслуживание оборудования и узлов на внешних поверхностях космических станций: визуальную инспекцию, технологические и ремонтные операции и обслуживание научных приборов.
По мнению экспертов, использование роботов в открытом космосе значительно снизит не только риски для жизни и здоровья экипажа, но и затраты на космические экспедиции. Кроме того, роботы, снабженные "искусственной кожей", найдут широкое применение и на Земли, при работе, например, под водой, при разборке завалов, то есть там, где использование человека нецелесообразно или опасно для его здоровья.
Фото: Артем Оноприенко (фотоклуб "Иллюминатор")
Фото: Артем Оноприенко (фотоклуб "Иллюминатор")